Harmonograph
This model finds it’s inspiration in the complex versatile harmonograph of ir. Hans van den Berg. It is still under development and can be downloaded via the VirtualMec forum.
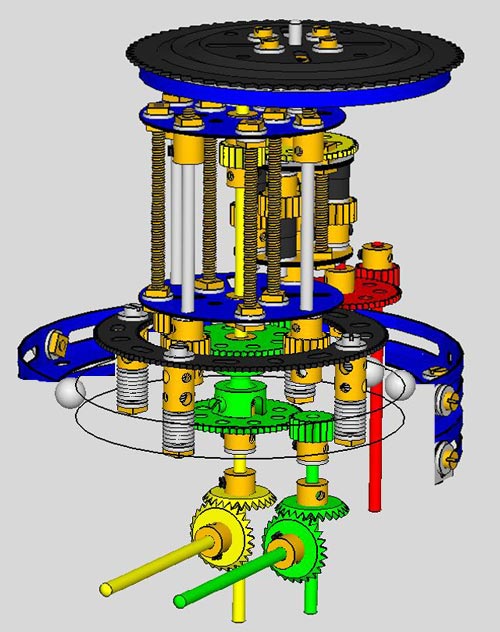
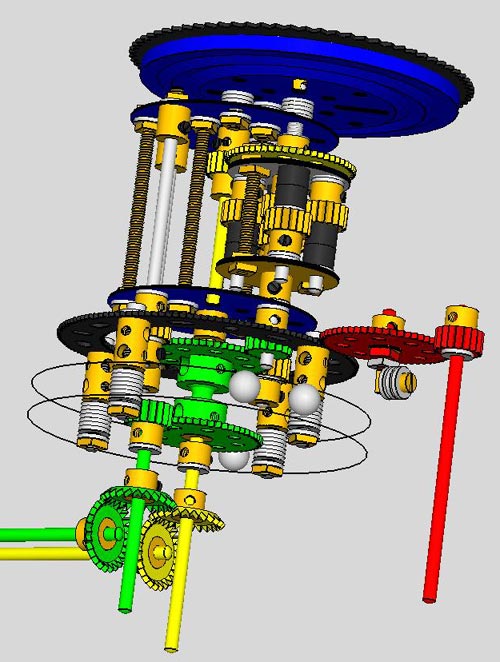
The basic idea is that the rotation of the papertable into the X and Y direction is incorporated within the construction of the model, based on elementary gearring systems like the one of the planet gear.
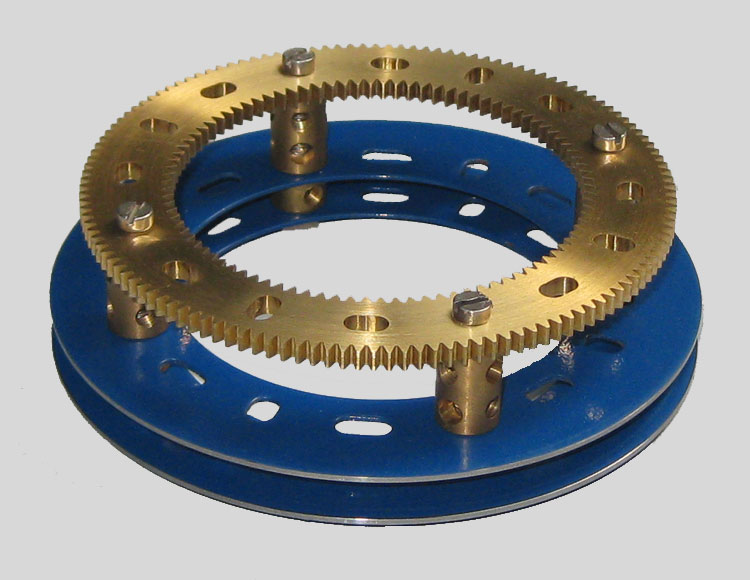
The all pinion differential is mounted excentrically between the 2 blue face plates 109 which functions as a cage. The papertable (on the top of the ball thrust race) is connected to the differential. When the cage rotates on it’s centre axis, the yellow axis) the papertable will rotate as an excenter, resulting in a circle (X and Y) movement.
The red axis actuates the outer side of the gearring. This will result in a rotating cage.
The green axis actuates the inner side of the gearring and 1 part of the differential. This can result in a lower or higher rotational speed of the gearring or even in a reverse direction! On the other hand this axis actuates the rotation of the papertable.
The yellow axis actuates the other part of the differential, like the green axis resulting in a rotating paper table.
It’s obvious that the starting speed of the actuaters are decisive for the way the papertables behaves. If the rotational speed of each actuaters can be variated within one cycle of a figure to be drawn, this mechanism might become an interesting alternative to those complex harmonographs or cyclographs we have seen in the past.
As said in the introduction, the computermodel can be uploaded via the VirtualMec forum and I am very curious how this model will develop itself by the help of the Meccanoscene.
Don’t hesitate contacting the author of this site for additional questions or remarks.